Calcolatore Trasformata di Laplace online
Trasformata di Laplace online
Variabile:
Siamo lieti di fornirti un ottimo strumento per calcolare la trasformata di Laplace online. Il Calcolatore trasformata di Laplace permette di ottenere la trasformata di una funzione nel dominio della frequenza senza la necessità di ricorrere a tabelle. Per utilizzarla è sufficiente entrare nella funzione, quindi scegliere la variabile indipendente di tale funzione ed infine premere il pulsante “Calcola”, una volta fatto, verrà automaticamente visualizzata una casella con la soluzione.
Che cos'è la Trasformata di Laplace
La trasformata di Laplace è un tipo di trasformazione integrale creata dal matematico francese Pierre-Simon Laplace (1749-1827) e perfezionata dal fisico britannico Oliver Heaviside (1850-1925), con l’obiettivo di facilitare la risoluzione di equazioni differenziali. Al giorno d’oggi, le trasformazioni Lapace sono ampiamente utilizzate dagli ingegneri elettrici per il calcolo di vari parametri dei circuiti elettronici.
La trasformata di Laplace ci permette di semplificare un’equazione differenziale in un problema di algebra semplice e chiaramente risolvibile. Anche quando il risultato della trasformazione è un’espressione algebrica complessa, sarà sempre molto più facile che risolvere un’equazione differenziale.
La trasformata di Laplace di una funzione f(t) è definita dalla seguente espressione:
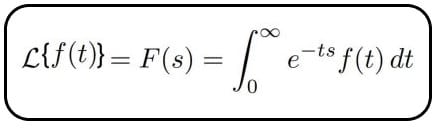
ndipendente t, risultando in un’espressione in cui l’unica variabile indipendente è s.
Per impostazione predefinita, il dominio della funzione f(t) è l’insieme di tutti i numeri reali non negativi. Il dominio della trasformata di Laplace varia a seconda della natura di f e può variare da funzione a funzione.
Applicazioni della Trasformata di Laplace
Anche se sappiamo già che la trasformata di Laplace è una tecnica volta a facilitare la risoluzione di equazioni differenziali, vale la pena applicarla in particolare a:
- Eseguire l’analisi del circuito elettrico
- Progettare controllori proporzionale-integrale-derivato (PID)
- Progettazione Sistemi di Controllo della Velocità per Motori DC
- Progettazione di sistemi di controllo della posizione per motori CC
- Risolvere sistemi di equazioni differenziali del secondo ordine